
Leading One Stop Embedded Solutions Provider
Serving Singapore, Malaysia and rest of ASEAN marketsOur Mission:To be the TRUSTED ADVISOR and the LEADING ONE STOP SOLUTIONS PROVIDER for embedded systems software and hardware development, catering to Singapore, Malaysia and the neighboring ASEAN market.
Best of Class Embedded Tools and
Solutions
Help Reduce Time To MarketEmbedded technology is key to the success of vital embedded applications in e-mobility, autonomous vehicles, mobile connectivity, advanced medical devices, smart city implementations, industrial automation, and many other related domains.
RIGHT Choice of the embedded development tools is imperative to win the race to be FIRST and RELEVANT in the market.
Trusted Technology Advisor
Recommending Best Fit Embedded SolutionsIt is our endeavor to be a trusted, proficient and a reliable embedded solutions partner helping customers all the way from identifying the best of class solutions/tools for their needs, customizing the solutions as per their specific requirements, demonstrating the solutions and finally training teams and ensuring that they make best use of the procured solutions and tools.

Strong Partnerships
With Technology Leaders WorldwideGES capably collaborates with technology leaders worldwide to bring together an ecosystem of best of class embedded hardware and software solutions, tools and products for the Singapore and ASEAN embedded markets.
Products and Partners
Latest News @ GES
SEGGER Flasher Hub-4
SEGGER announces the immediate availability of the Flasher Hub-4. In combination with Flasher Compact devices, it forms a space-efficient, cost-effective solution for high-speed, high-volume production programming.
HighTec EDV-Systeme GmbH
HighTec EDV-Systeme GmbH is the first to offer an ISO 26262 ASIL D qualified Rust compiler for Infineon Technologies AURIX™ microcontrollers!
New for You! TPT 20
PIKETEC announces the release of TPT 20, introducing groundbreaking features to elevate automotive testing. Experience unparalleled efficiency and versatility with TPT 20 - the ultimate solution for automotive testing.
Featured Products
New for You! TPT 20
Achieve 100% code coverage in minutes, leverage powerful connections for advanced simulations and automate test case generation from formal requirements. Experience unparalleled efficiency and versatility with TPT 20.
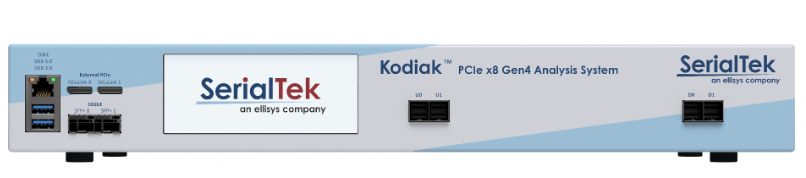
ExplorePCIe 6.0 / CXL 3.0 Protocol Test System
SerialTek Announces PCIe 6.0 / CXL 3.0 Protocol Test System with industry's Deepest Capture Depth at 288GB, New 16-Lane Kodiak™ 64GT/s Test Platform Also Adds Protocol Emulation Capablity.
Panda iTAP™ Embedded PCIe Analysis

The Panda appliance conveniently brings together SerialTek’s iTAP™ technology and BusXpert™ software with Broadcom PEA technology to smartly solve the problem of analyzing embedded PCIe links in ICs such as the Broadcom PEX89000 PCI Express Gen 5.0 ExpressFabric Platform.
ExplorePCAN-GPS : Programmable Sensor Module with CAN Connection

The PCAN-GPS is a programmable sensor module for position and orientation determination. It has a satellite receiver, a magnetic field sensor, an accelerometer, and a gyroscope.
ExploreHigh & Middle-end Logic Analyzers
LAP-F1-40/ LAP-F1-64-State mode: 200 MHz (Dual-edge), LAP-C Pro(32256M)/LAP-C Pro(32128M)/LAP-C Pro(32064M)-Timing mode: 2GHz, LAP-C Pro(16064M)-Timing Mode:100Hz~200MHz
ExploreRELY-MIL-TIME-SERVER : Time Server on EU Program : GPS/PTP/NTP Time Server and Bridge

RELY-MIL-TIME-SERVER is a MIL-STD-810G & MIL-STD-461G certified product that embeds the latest timing, networking, and security technology. This new concept of all-in-one rugged Edge computing device serves secure accurate timing distribution.
ExploreDediprog Trade In Program

Dediprog Trade In Program : Save up to 50% off to upgrade your programmer NOW!. Please send an email to sales@embeddedindia.com / sales@esaindia.com get an Trade-in Quote.
ExploreMultilink Debug Probes

Multilink debug probes allow a PC access to the Background Debug Mode (BDM) or JTAG interface on wide range of ARM Cortex and 8-16-/32-bit devices, in order to halt normal processor execution and use the PC to control the processor.
ExploreCyclone Programmers
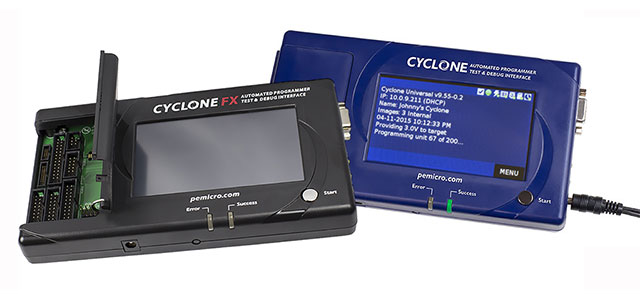
Cyclone flash programmers are powerful tools for in-circuit programming, debugging, and testing of MCU devices. They can function in stand-alone mode or be controlled from a PC. Programming may be launched by a single button press without a PC, or automatically from a PC via the automated control SDK.
ExploreemPower OS-The High-Performance Software Platform

SEGGER's emPower OS is a complete operating system that provides the ideal environment for any developer creating an embedded system or IoT device, including e.g. an RTOS, file system, user interface, webserver, connectivity, security, and IP. This makes it the all-in-one solution.
ExploreAukua Systems Introduces New XGA4250 High Speed 3-in-1 Ethernet & IP Test Platform

Aukua Systems, Inc., a leading provider of precision Ethernet & IP Test and Monitoring solutions, today announced the release of the new XGA4250 hardware platform. This new platform complements Aukua's popular MGA2510 by extending its unique 3-in-1 testing solution to support higher speeds of 25G.
ExploreSEGGER Introduces Flasher PRO XL

SEGGER introduces the Flasher PRO XL is the extra-large memory version of SEGGER’s universal flash programmer Flasher PRO, including all the same features plus the option of expandable memory.
ExploreNew version V5 of SEGGER Embedded Studio IDE now available!
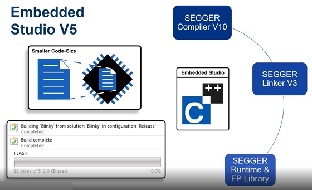
Embedded Studio for ARM enables efficient development for all ARM-based devices. With support ranging from small Cortex-M microprocessors used in IoT nodes to powerful Cortex-A cores in complex systems.
ExploreTHINK DIAMOND for 2-in-1 SBCs : CPU + Data acquisition on a single board.

A 2-in-1 SBC combines the standard CPU+system I/O of a traditional single-board computer with a full-fledged data acquisition subsystem to provide double density in the space of a single board helps to reduce the size & weight.
ExploreDediProg Launches NuProg-E2 Engineering Universal Programmer

DediProg Technology launches a new all-in-one engineering IC programmer NuProg-E2, supports most IC types on the market providing a more completed and efficient solution for application engineers.
ExploreSEGGER Embedded Studio Available for the Renesas RE Family of MCUs

Embedded developers can now use SEGGER Embedded Studio IDE with the Renesas RE Family of microcontrollers (MCUs).
ExploreSANBlaze Announces the SBExpress-DT4 NVMe Test System

SANBlaze is pleased to unveil its latest system in the family of NVMe test systems, the SBExpress-DT4. This portable desk top unit packs all the same features as its big sister the SBExpress-RM4 yet rather than live permanently in a server room rack, it can be taken to a customer site.
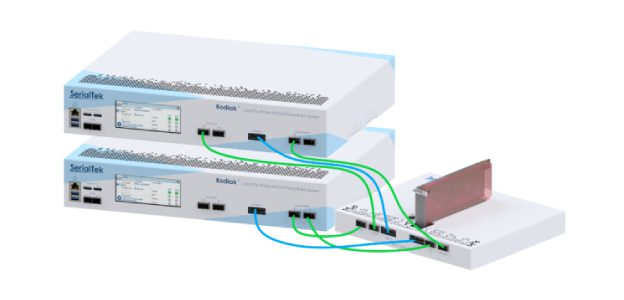
ExploreKODIAK™ PCIE GEN5 ANALYSIS SYSTEM
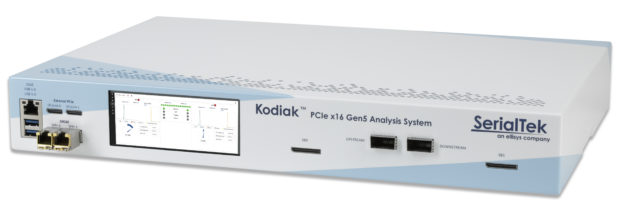
PCIe Analysis Platform with Embedded Hardware, Calibration-Free SI-Fi™ Probing and Automatic Equalization, Internal SSD Storage, Touchscreen LCD, and Standard PCIe Cabling. No tuning (calibration) required, Kodiak’s Rx automatically equalizes (EQs) the incoming PCIe signals at all data rates. Deep 144GB Trace Buffers.
ExploreModel-in-Loop Testing: Automatic Test Case Generation with TASMO

Generate test cases automagically. TPT is the ideal tool for automated testing of ECU software. In order to make MiL testing with TPT more efficient PIKETEC has developed a particularly powerful tool for automated test case generation.
ExploreSW version 3.11

XJTAG 3.11 adds ARM® SWD support, user libraries, and a clock generator to boundary scan testing. These enhancements simplify the control of SWD devices when JTAG can’t be used, increase flexibility, and give you even greater convenience.
ExploreDiamond Systems MIL-Grade Solutions

Managed 8-Port Gigabit Ethernet Switch with wide voltage input and serial management port. Managed Layer 2+ Ethernet switch module.
ExploreNew release v4.9.4.0 of C/C++ compiler for TriCore
Added compiler support for the new AURIX TC3xx derivatives. Development Platform C/C++ compiler suites for automotive and industrial. HighTec's multi-architecture and multi-core C/C++ compiler suite with leading optimization technology
ExploreCross-platform freedom: SEGGER's J-Flash now available for Windows, macOS & Linux.

SEGGER J-Link now available on every popular operating system: Windows, macOS and Linux. The J-Link software and included command line tools.
ExplorePXROS-HR is SIL3 and ASIL D Safety Approved

Optimized RTOS for TRICORE, AURIX AND AURIX 2G. HighTec is proud to announce that our operating system now has been officially safety approved.
ExploreAll-in-One Programmer

Support 99% IC Kinds!!
eMMC, UFS and SPI Flashcan support
Dual Sockets and Dual Socket Sites Leads/
to Double Efficiency
PyCharm

PyCharm is designed by programmers, for programmers, to provide all the tools you need for productive Python development. PyCharm provides smart code completion, code inspections, on-the-fly error highlighting and quick-fixes, along with automated code refactorings and rich navigation.
ExploreDebug from home: SEGGER's J-Link Remote Server adds encryption

SEGGER's J-Link Remote Server is a proven way to debug remotely. It has been used for years to debug target systems, thousands of miles away.
ExplorePCAN-MiniDiag FD

The German company PEAK-System has published the handheld device PCAN-MiniDiag FD for the basic diagnosis and fast checking of CAN and CAN FD buses. The battery-powered device has functions which show, for example, the termination, bus load, message and error counters.
ExploreEnergy Efficient Ethernet testing using Aukua MGA2510

Energy efficient Ethernet is a set of enhancements to the twisted-pair and Ethernet standards that reduce power consumption during periods of low power activity. The Aukua Ethernet Traffic Generator is an easy to use purpose-built Ethernet test system for R&D, Test and Support engineers for stressing, validating, troubleshooting and debugging.
ExploreQuarch Hassle-free drive power testing Programmable Power modules

Fault injection testing without the tedious processes. Power analysis without the complex, unwieldy equipment. Supporting SAS/SATA and PCIe storage devices, our PPMs both power your device under test and test a huge range of scenarios – such as power margining, power loss, brownout, glitch and more.
ExplorePCIe® Gen4 NVMe SBExpress Test System
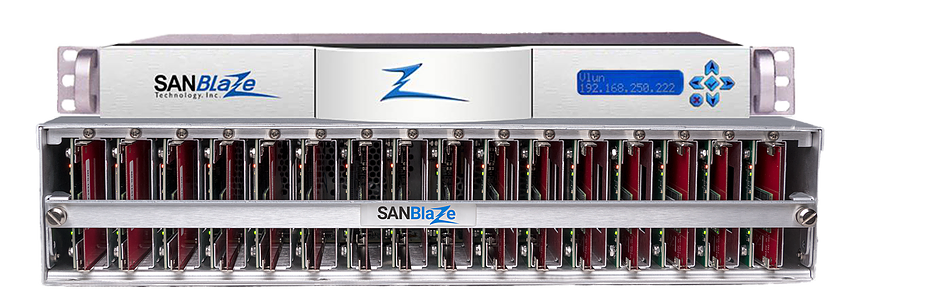
The SANBlaze SBExpress-RM4 is a complete turnkey PCIe® Gen4 NVMe SSD Drive validation test system. The SBExpress-RM4 feature set provides unique functions applicable to all aspects of a product lifecycle, from development and QA, to design validation and manufacturing test cycles.
ExplorePCIE Gen4 X16 SFF-8654 host card with Broadcom Atlas B0 PCIE Switch
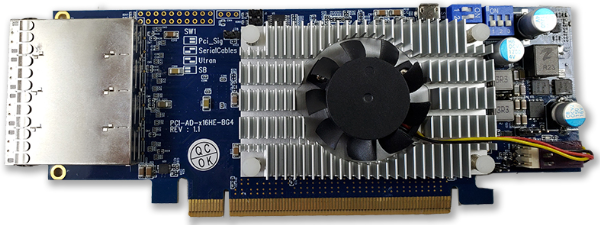
Gen4 PCIe x16 external host card with Broadcom Atlas B0 PCIe switch w/1×4 SFF-8644 receptacles. x16 External Atlas based Host Card :- Can be configured to 1x16, 2x8, 4x4 and 8x2. This host card supports bifurcation down to 8×2’s per/station and is user configurable through onboard CLI.
ExploreKodiak™ Next-Generation Gen4 PCIe®/NVMe™ Analyzer
The Kodiak PCIe Gen4 Analysis System represents the state-of-the-art in protocol analyzer design. PCIe/NVMe Analysis Platform with Embedded Hardware, Real-Time Protocol Processor™, Calibration-Free SI-Fi™ Probing and Automatic Equalization, Internal SSD Storage, Touchscreen LCD, and Standard PCIe.
ExploreRelyum Time-sensitive networking solution
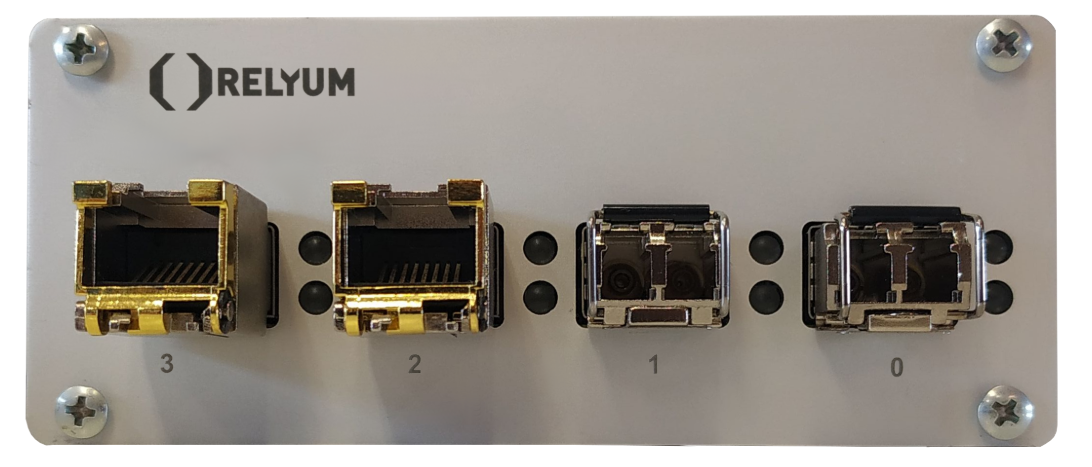
Relyum extends its TSN offerings to new products with Interest on Time-Sensitive Networking increases day to day in every sector. Industrial Internet of Things (IIoT) offers smart infrastructure and hyper-connected devices with sensing, processing, and networking capabilities.
ExploreIntel® oneAPI Toolkit

Intel® has created a product implementation of oneAPI with the Intel® oneAPI Toolkits, which help developers efficiently build, analyse, and optimise high-performance, cross-architecture applications.
ExplorePCAN-Router Pro FD

Programmable 6-Channel Router for CAN and CAN FD with I/O and Data Logger. With six channels, the PCAN-Router Pro FD links the data traffic of modern CAN FD and classic CAN buses.
ExploreQuarch HD Programmable Power Module

Available in a multi-port, rack-mounted version, ideal for simultaneous multi-device testing. HD modules take all the benefits of the XLC module plus multiple improvements including a high-density option, performing full power margining from 0V to nominal +20%, with complex voltage ramps.
ExploreFlash Programming in Mass Production for Renesas RL78

SEGGER announces in-circuit-programming support for Renesas RL78 microcontrollers. Production and service teams, which need to handle RL78 based.
ExploreSANBlaze SBExpress for NVMe 2.5″ SSD Validation

The SANBlaze SBExpress Support for latest UNH IOL conformance tests and full feature set provides a unique set of functions applicable in all aspects of a product lifecycle; from development to design validation to test and QA. Ability to drive NVMe SSDs with a wide range of configurable attributes.
ExploreLabTool-48UXP new device supports latest SW V12.10

The LabTool-48UXP features universal pin driver, each pin can supply four different voltage, ground, it also can be configurable as TTL high/low levels with pull-high/pull-low, high-speed clock and high impedance. This advanced pin design program any DIL device of up to 48 pins.
Explore



















GES Product Portfolio
GES offers a wide range of highly integrated hardware and software embedded solutions ranging from – Development Suites, Middle-ware Solutions, In-Circuit Debuggers/Emulators, Connectivity Solutions, Embedded Security Solutions and Hardware Subsystems. Our ecosystem of tools and development solutions from leading vendors across the world, holistically supports the entire development life-cycle of embedded systems from design, development, debugging to verification and validation.
Gopalam Embedded Systems at Future Mobility Asia Exhibition and Summit 2023
GES helps accelerate your time-to-market by providing a strong product portfolio of software and hardware development tools in partnership with leading OEM partners globally.
GES Tool Partners are also authorised NXP Partners with deep knowledge and vast experience in providing total system solutions for automotive, communication infrastructure, industrial, mobile, and smart solutions.
Here is GES Future Mobility Asia Exhibition and Summit 2023 Product Portfolio!
Embedded Systems Solutions and Development Tools
At GES, we aspire to support customers with our extensive knowledge and vast experience in embedded systems to help them innovate and deliver superior embedded designs. We enable our customers to concentrate on their core business problems while relying on us to quickly recommend, and build tailored solutions for their embedded development. We cater to a broad range of embedded tools and solution requirements across various verticals like automotive, aerospace, defense, education, electronics design/manufacturing, energy, industrial automation, instrumentation, medical devices, military, semiconductor, and telecom/Datacom.
GES delivers system-level solutions for embedded systems including application porting, device driver development, RTOS porting to target Systems, applications in C and C++, assembly, and firmware.
