
OVERVIEW
Balancing a ball on a table in a desired position is one of the most important and classical problems of control engineering. Advanced control techniques are used for the stability of the ball, which are very essential techniques in modern industrial control processes. Students have the opportunity to conveniently learn the essential aspects of control theory by experimenting.
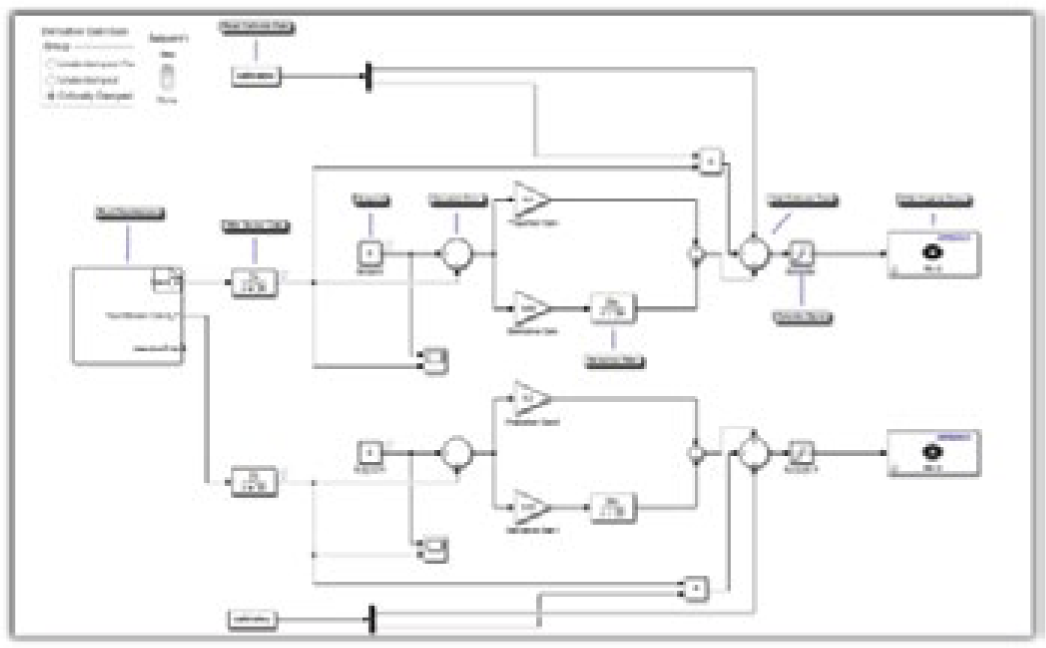
OPEN-SOURCE CONTROLLER SOFTWARE
Ball Balancing Table is fully compatible with NI myRIO and Arduino. Completely open source system software makes it possible that students can modify and test their own developed control algorithms. Students can understand the effects of controller types on the system and can easily cover concepts of controller design. The system is also suitable for graduate studies for designing advanced controller types such as robust control, adaptive control and etc.
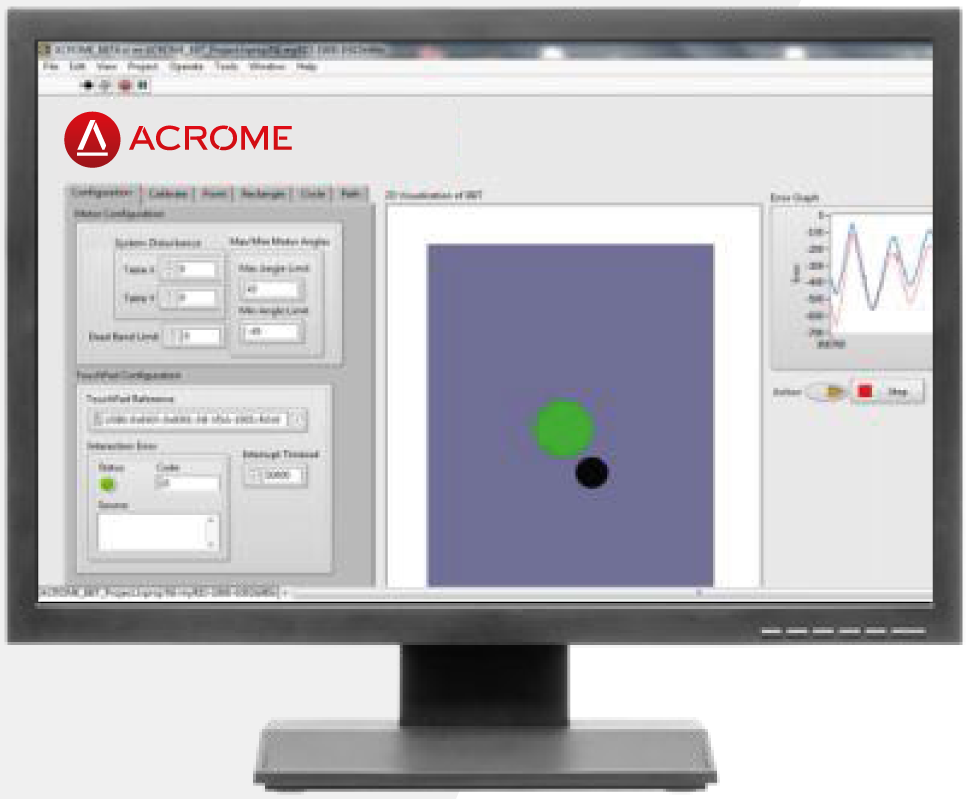
INTUITIVE SOFTWARE AND INTERFACE
The user interface allows students to understand the advanced control techniques for balancing problem easily. Beside the position control of the ball, students have the option to make the ball follow rectangular and circular paths. As a patented method students also have the option to draw their own paths on the table and make the ball follow the drown path.
Features
- Compatible with NI myRIO and Arduino
- Assembled and ready to control plant with the integrated power unit
- Implementation of advanced digital control techniques.
- Position feedback using a high precision touch surface (Camera based feedback is also possible)
- Actuating the table by RC servo motors, which are familiar to students
- Rectangular and circular path options are integrated into the software
- Enables students to create their own real-time algorithms.
- Open architecture with extensive courseware, suitable for undergraduate courses for engineering disciplines related to control systems
- Available in NI LabVIEW or Matlab/Simulink
Curriculum
| Components of Ball Balancing Table | Fundamentals of PWM | System Modeling | Feedback in Control Systems |
|---|---|---|---|
|
|
|
|
| Performance Measures | Control System Design | Control System Verification | |
|
|
|
