OVERVIEW
1-DoF Helicopter has been designed to simplify the intelligent control strategy of flight systems. With the motor compatible electronic speed controller and high-resolution encoder 1-DoF Helicopter enables the student to experience the main concepts of quadcopters, rockets, hovercrafts, and underwater vehicles. Ready to use courseware enables the student to understand the main topics of control engineering such as system modeling, linearization, linear control system design and frequency response analysis. The fully open-source software gives the freedom to students and researchers to modify the algorithm or design their own structure.
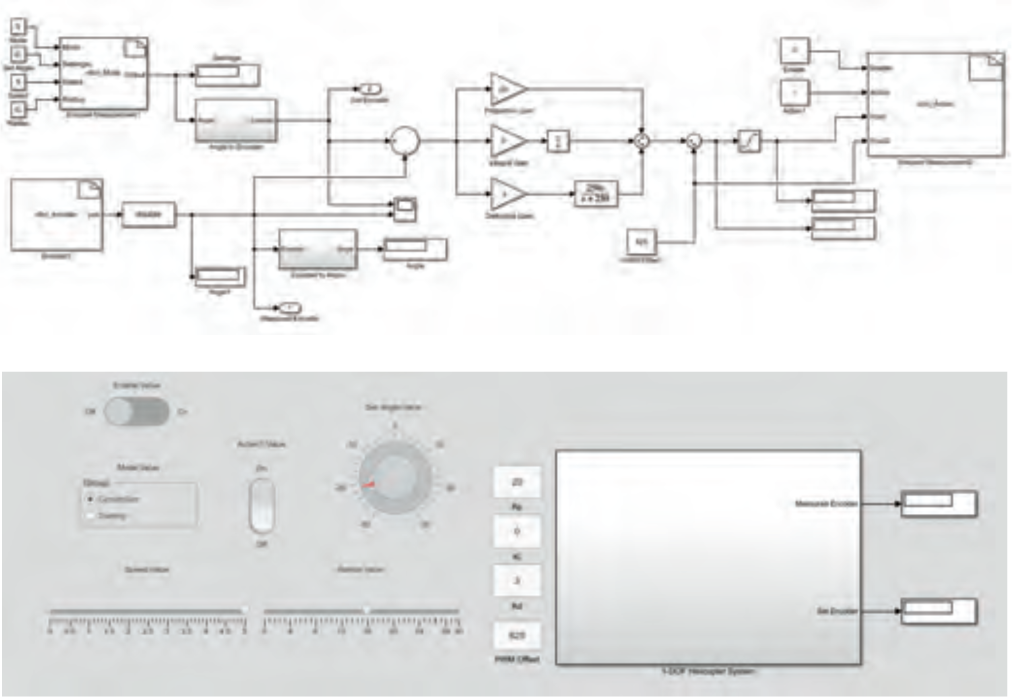
CREATIVE USER-FRIENDLY GUI
Available in NI LabVIEW or Matlab / Simulink as an open source software allows students to implement their own controller designs. Predesigned 1-DoF Helicopter model and controllers are ready for performance measurements and observing responses of fundamental controller types. User-friendly GUI includes 3D model of the system. Steady-state error for standard test inputs, phase difference and amplitude ratio for sinusoidal inputs can be easily covered due to graphical demonstration for both simulated system and real system.

OPEN-SOURCE EMBEDDED SOFTWARE
1-DOF Helicopter, with its easily accessible and student-friendly components, is a hands on experiment, closing the gap between real industrial systems and DIY-approach. Compatibility of NI myRIO and Arduino enables the students to design complex applications and engineering systems quicker and easier than ever before.
Features
- Solid body for precise motion and measurement
- High resolution incremental encoders for angle of rotor arm and motor RPM measurements
- Motor speed control directly with the controller
- Compatible with NI myRIO and Arduino
- Ready to control plant with the integrated power unit
- Open architecture with extensive courseware, suitable for undergraduate courses for engineering disciplines related to control systems
- Enables students to design their own real-time controllers.
Curriculum
| Components of 1-DOF COPTER | Feedback in Control Systems | System Modeling |
|---|---|---|
|
|
|
| Performance Measures | Control System Design | Control System Verification |
|
|
|
