
OVERVIEW
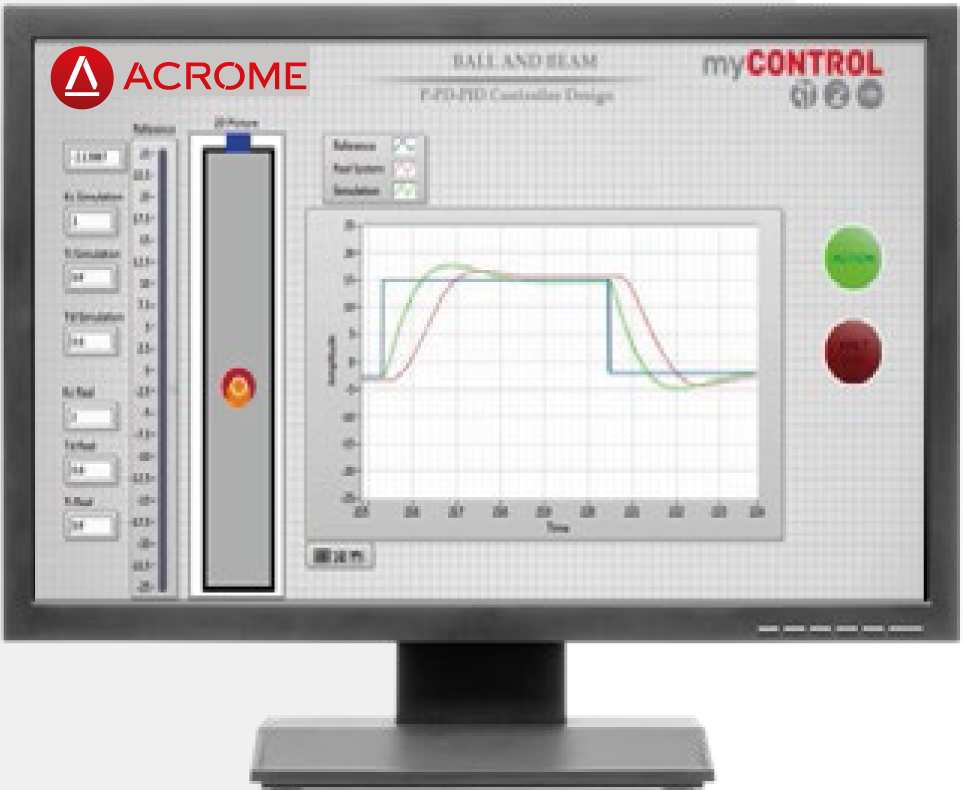
Ball and Beam system can be used for a wide range of control system design implementations from basic linear controllers to advance nonlinear methods. Students are able to understand system design approaches with hands-on methodology. Effects of linearization, modelling errors and control algorithm's defficiencies could be visually distinguished and further analyzed thanks to the provided Graphical User Interface. User Interface contains plots of the simulated response and system's real measured values.
OPEN-SOURCE EMBEDDED SOFTWARE
Ball and Beam System, with its easily accessible and student-friendly components, is a hands on experiment, closing the gap between real industrial systems and DIY-approach. Compatibility of NI myRIO and Arduino enables the students to design complex applications and engineering systems quicker and easier than ever before.
CREATIVE USER-FRIENDLY GUI
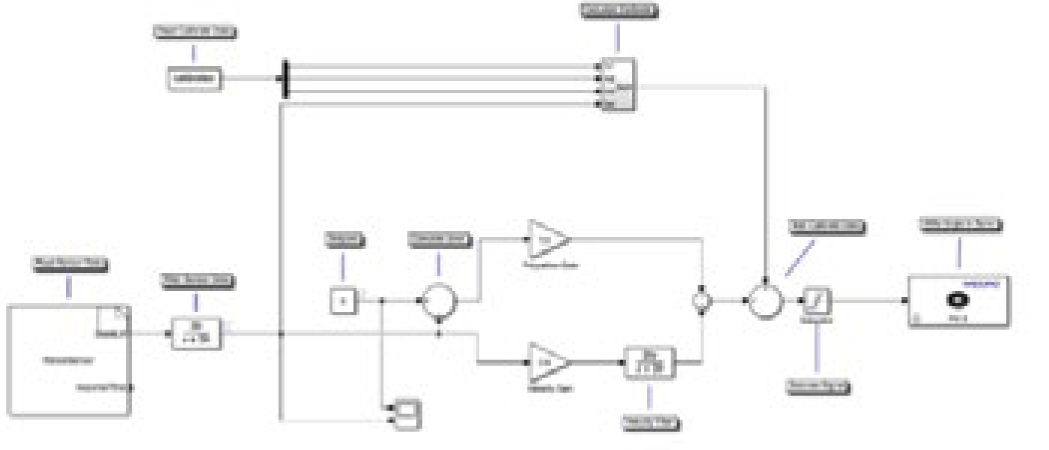
Available in NI LabVIEW or Matlab / Simulink as an open source software allows students to implement their own controller designs. Predesigned ball-and-beam model and controllers are ready for performance measurements and observing responses of fundamental controller types. User-friendly GUI includes 3D model of ball-and-beam system. Steady-state error for standard test inputs, phase difference and amplitude ratio for sinusoidal inputs can be easily covered due to graphical demonstration for both simulated system and real system.
Features
- Compatible with NI myRIO and Arduino
- Ready to control plant with the integrated power unit
- Suitable for linear and advanced nonlinear control methods
- Ball position sensing by a linear potentiometer
- Actuating the beam by an RC servo motor, which is familiar to students
- Enables students to design their own real-time controllers.
- Open architecture with extensive courseware, suitable for undergraduate courses for engineering disciplines related to control systems
Curriculum
| Components of Ball Balancing Table | Fundamentals of PWM | Feedback in Control Systems | System Modeling |
|---|---|---|---|
|
|
|
|
| Performance Measures | Control System Design | Control System Verification | |
|
|
|
