Co-simulation tests in TPT's FUSION environment
The integration platform FUSION by Synopsys makes it possible to connect an arbitrary number of software modules, that practically need different execution environments, as a single closed system. The modules can exchange data during the test run. The FUSION platform supports many test environments like C-code, CAN, INCA, PLS UDE, ASCET, MATLAB Simulink, Functional Mockup Units (FMUs), and external I-O-cards.
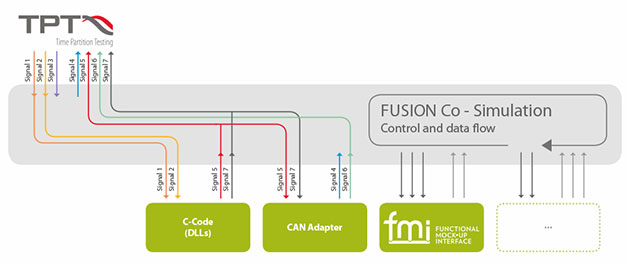
FUSION nodes
The modules connected to the FUSION are called nodes. Each node is connected to the FUSION via an API. Each node reads input signals, calculates its outputs for a time step and writes them to the FUSION. The nodes are executed per sample one after the other in their order. More complex scheduling and function calls are possible.
FUSION nodes can exchange signals with each other and with TPT at any time.
If a real-time node is inserted, the test execution takes place in real time, although FUSION as a Windows process does not meet real real-time requirements. By using the real-time node TPT can communicate with external hardware, HiL systems or application tools.
You can also write FUSION nodes yourself. For this purpose, you will find your own API, which can be used to configure initializations and cyclic interactions between TPT and your system. How this works in detail is described in the FUSION Programmers Guide.
You can generate FUSION nodes from MATLAB Simulink/Targetlink models, ASCET models, or AUTOSAR software components automatically at the push of a button with TPT. You can simulate these nodes with other nodes in a completely flexible way. This makes rapid SiL tests possible.
